

















"从神经网络和棍棒":如何不寻常的是机器人的教育要走
 Source:
Source:
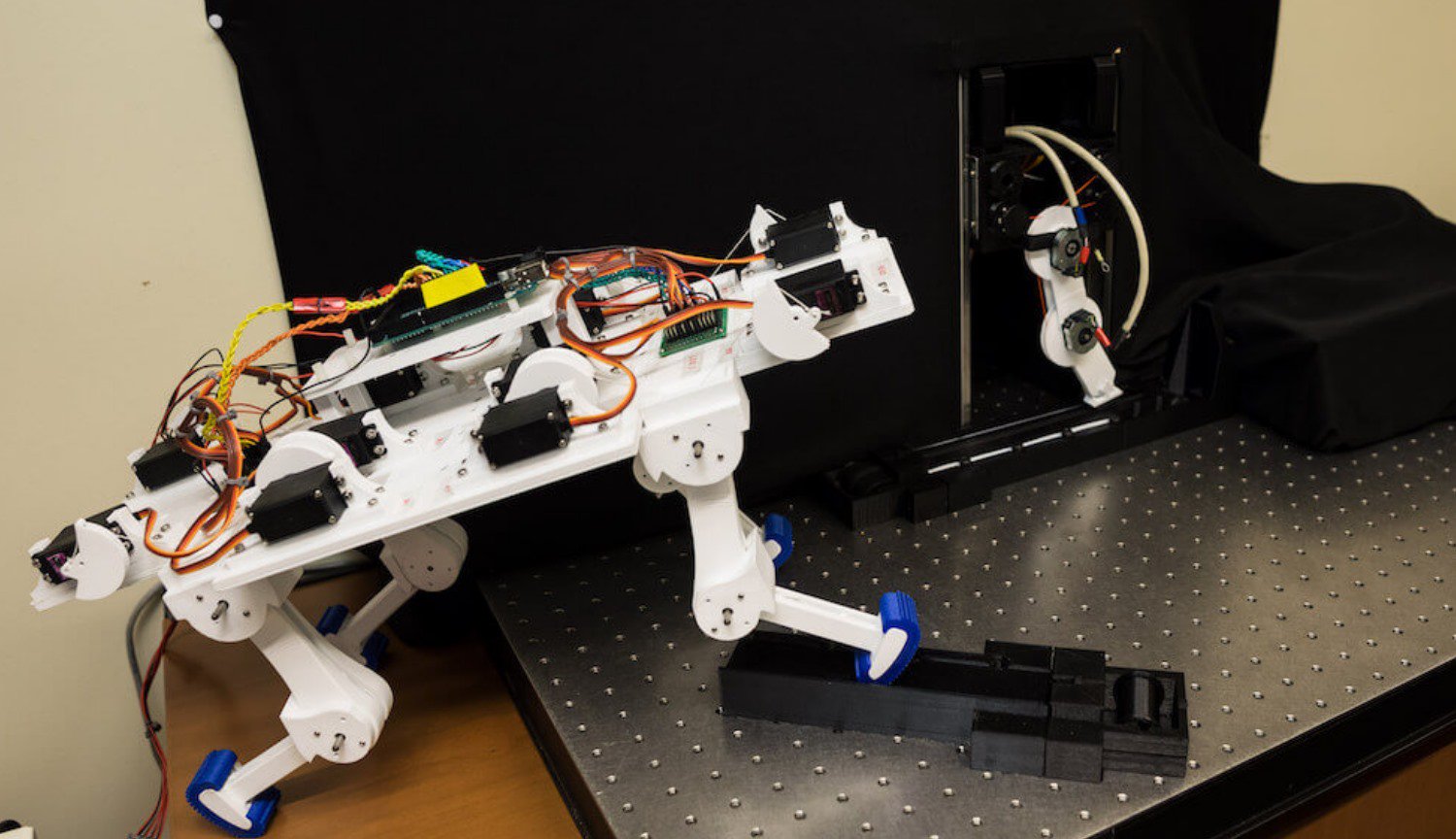
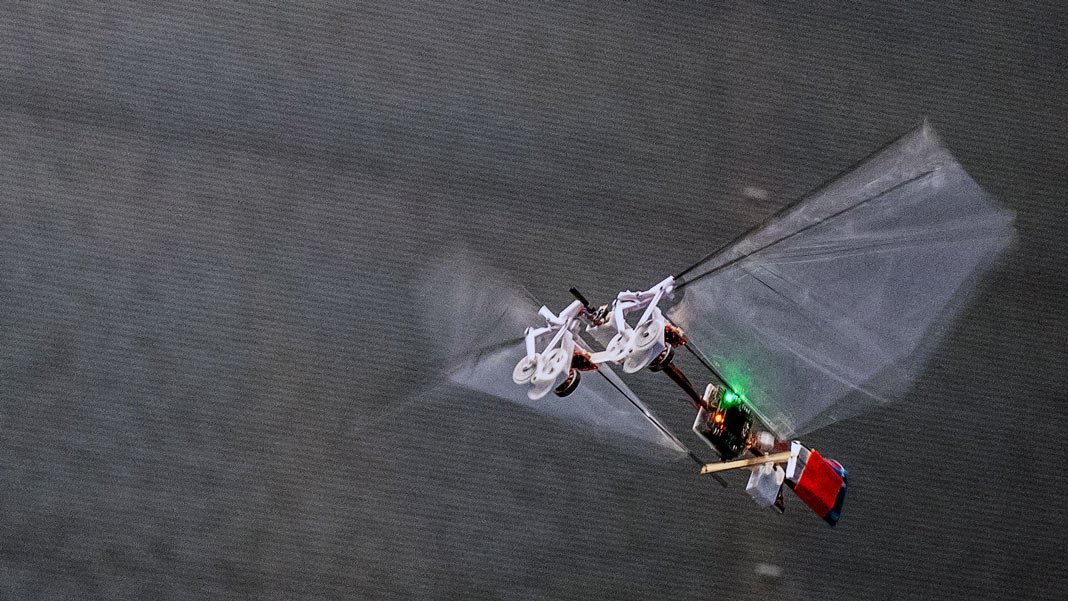
如今,机器人不同的形状是非常困难感到惊讶。 但是一群科学家从日本似乎已经取得了成功。 他们建立了奇怪的机器人来自棍棒和…;其他废料。 此外,由于非常先进的系统的人工智能基于神经网络、机器人学会走路. 和奇怪,因为它可能的声音,但这种方法有一个很有希望的未来。
<跨id="更317655">
如何创建
通常,在设计机器人、科学家需要有一个非常清楚地知道什么机器人应该做的,他是怎么移动和采取什么行动,它应该执行。 在此首先需要建立一个原型的未来的设备,以确保他们所有的计算是正确的,并确定存在缺陷的设计。 但是发展进程并没有结束。 后形成的理解关于如何操作模式,将需要采取的行动应当执行,是否作为一个机械手,走或移动在其他方面。
机器人的分支机构
但是,正如科学家从东京大学和公司首选网络,创建过程的机器人不必是那么困难。 在十二月的最后一年,他们开始实验创造机器人基于的伺服控制器和废料(例如树枝).
<大段引用>参见:
然而,在建立该模型的机器人在一个特殊的计算机模拟,在那里他们学会走路先进的神经网络基于深刻的机学习。 以下载模式中的神经网络、科学家只需要几分支机构的权利的大小和机器人的身体。 所有这一切都是受到3D扫描。 该模型显示,在一个特殊的计算机程序,其«;收集»;他们在一起并且开始学习的过程。
<面width="500"height="281"src="https://www.youtube.com/embed/-kg8ndan1UY?feature=oembed"架边界="0"允许="加速计;自动播放;加密-媒体;陀螺仪;画中画"allowfullscreen>
在这些«的经验教训»;设置的模型未来行为的机器人。 对于一个真正的运动神经网络«奖励»;未来的机制,并对不正确的—«惩罚». 此外,有一个手动设置的运动,以及系统,该系统引发的发生随机事件期间的培训,以便对机器人的大多数准备什么在等待着他在真实的世界。 它结束的时候,它仍然只是组建该模型和装载的行为。
a<他们>机器人都是由控制系统控制的基础上Arduino大型和伺服Kondo KRS-2572HV
为什么建立这样的机器人?
事实上,这种系统是巨大的。 事实上,所有你需要的—;这«;计算机和一对夫妇的汽车». 其他细节可以收集直接在他的脚下。 这些可用于探索在该区域的人不能到达,并发送全机制是过于昂贵。 此外,这种机器人可以组装,例如,当。 你可以,例如,发送该组合模块,与供应微处理器和伺服器和其他项目,以收集在抵达特派团。
讨论这个和其他新闻,你可以在我们<强>
建议
焦虑时,不是所有的作品,因为它应该,而是一个完全彻底改变,往往仍然仅是个人的道德准则,其中,像一个罗盘指示的方式。 但是什么引起的道德价值对一个人? 社会、亲人温暖、爱#8212;它是所有基于人类经验。 当你无法充分经验现实世界中,许多获得经验的书。 重温故事之后的故事,我们采取自己的内部框架,其中我们遵循多年。 在此基础上系统,研究人员决定进行一项实验,并灌输道德价值观的机,看看如果机器人可以区分善恶,阅读书籍和宗教的小册子。 的人工智能是创建不仅是为了简化程序的任务,而且要执行重要的和危险...
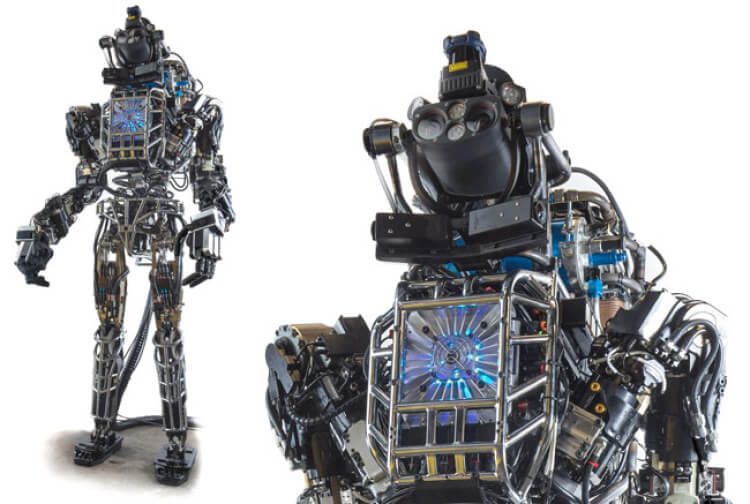
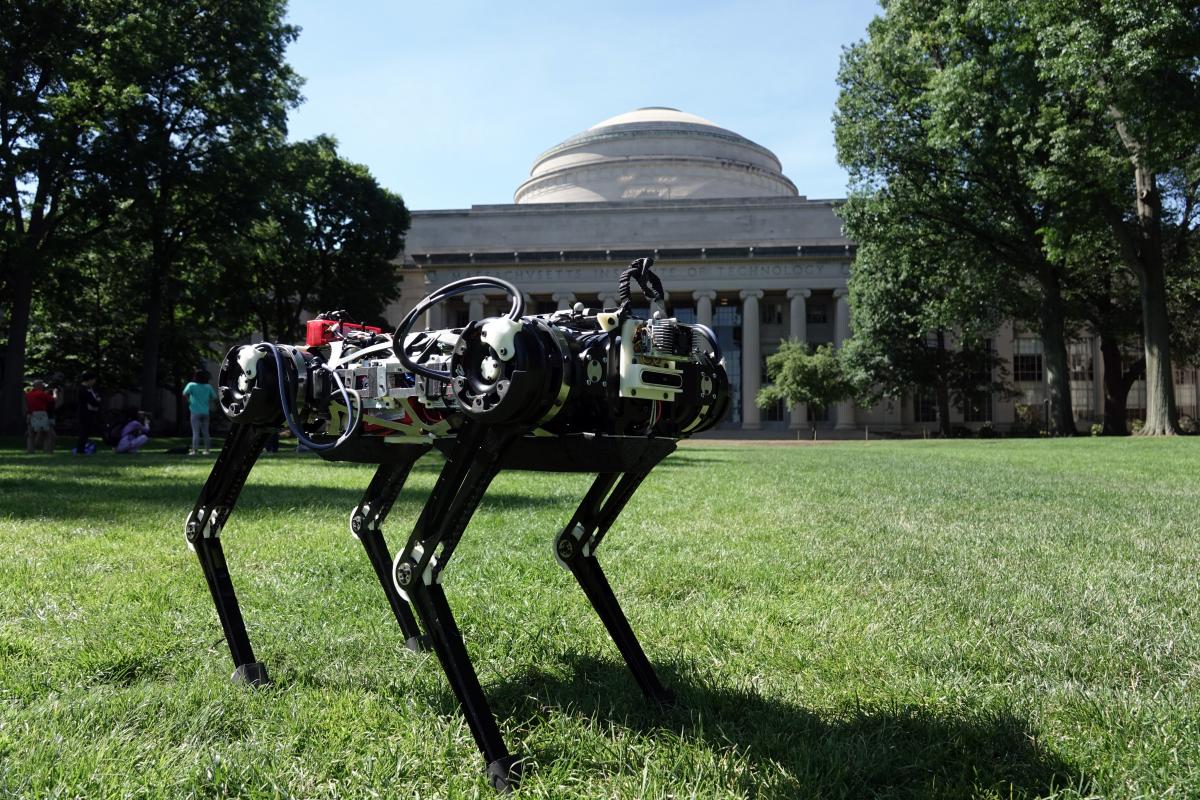
现在,当它涉及到机器人,看来没有人们想象镜头从"终结者"。 学会了使用机器人的良好社会,现在根据这一定义,躲不仅人形机器,也是那些仅仅能够实现自动化的一个进程或另一个。 巨大的工业机器人正在用于采矿企业、工厂、车会和家用电器,以及小其对应方定居在某些房子里。 但有最先进的机器人在地球上? 如果是这样,它看起来如何和工作的? 如何创造最为复杂的机器人 这个机器人是创造了近7年前,它是不断发展,到目前为止,还没有一个已经成功地超越. 机构为国防部高级研究项目,美国(国防部研究计划局)共同开发了人形...
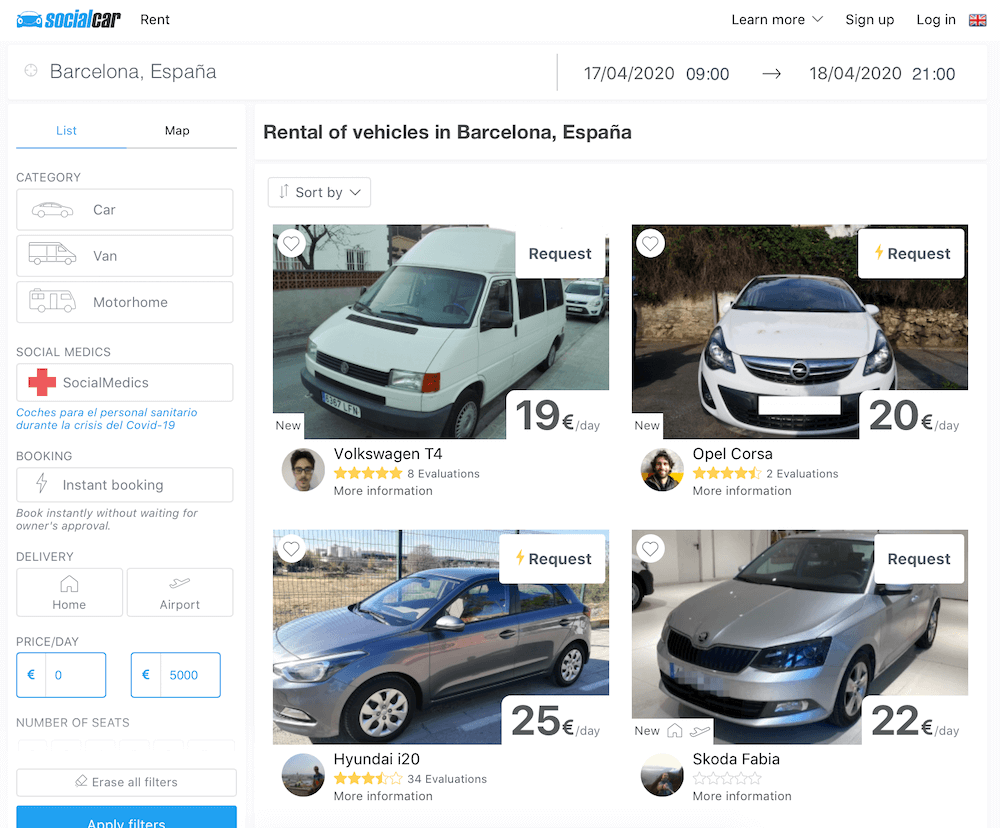
最近的伊隆麝香透露的秘密千年的摄像头上后视镜的车特拉斯模式3. 虽然主要目的的任何摄像机拍摄周围发生的事情,发现了一些细节。 因此,该相机将按照车辆的时刻,当它的工作原理在自动驾驶仪或租金,直到所需的主(麝香认为,这将是«排斥»的部分费用在购买车)。 其他的相机的功能:识别驱动程序(如果有多个)和自动调整的所有系统,以一个特定的人。 从座位和镜子所构成的气候系统。 特斯拉的发展是跨越式发展,被广泛使用的道路和汽车本身是能够跟停车场附近。 这是一个现实,我们阅读小说,一些5-1...
相关消息

软机器人可能是未来的机器人,但现在他们有一些缺点,在他们的设计。 例如,有可能这样的机器是有限的,因为的需线的管理。 换句话说,他们需要连接到外部设备、管道和水管通过压缩空气供应和管理。 这样,可以限制其功能,例如,当使用在空间飞行任务、搜索和救援作业和其他领域。 软机器人 队从哈佛大学中概述的第一个步骤在发展中的新一代软机器人。 他们开发了一种方法,允许你拒绝的许多电线和水管和替换所是唯一一个入口,用于压缩空气。 这不仅大大简化了的机器的设计,但也使它...






...


...

...


...

...

评论意见 (0)
这篇文章已经没有意见,是第一个!